Latest activity
-
 PaulStoffregen replied to the thread Teensy 3.2 SPI speed decreasing over time.You might consider this line when millis() grows to more than 23 bits (the size of float mantissa), which takes a little over 2 hours. float tempo = (float)millis()*0.003f; You'll gradually lose millis precision. Maybe that matters, or...
PaulStoffregen replied to the thread Teensy 3.2 SPI speed decreasing over time.You might consider this line when millis() grows to more than 23 bits (the size of float mantissa), which takes a little over 2 hours. float tempo = (float)millis()*0.003f; You'll gradually lose millis precision. Maybe that matters, or... -
 PaulS replied to the thread Servos Misbehaving.Looking at your code I noticed this line: servo1.attach(14, 500, 2400); Is there a reason why you deviate from the standard values of 1ms and 2 ms, like so? servo1.attach(14, 1000, 2000); Paul
PaulS replied to the thread Servos Misbehaving.Looking at your code I noticed this line: servo1.attach(14, 500, 2400); Is there a reason why you deviate from the standard values of 1ms and 2 ms, like so? servo1.attach(14, 1000, 2000); Paul -
PaulS replied to the thread Servos Misbehaving.More commonly known as XY-016 module. But still very limited in specs. Paul
-
SShadycrisp replied to the thread Servos Misbehaving.Yes that's what confuses me is the lack of a min voltage for the control signal. Sorry the step up is here: https://grobotronics.com/dc-dc-converter-step-up-5-24v-2a.html
-
PaulS replied to the thread Servos Misbehaving.Yes, I do mean the control signal pin. The specs of the Tower Pro MG90S do not mention a minimum voltage for the control signal amplitude. I also did not find any specifications of the WHS15024 boost/step-up converter. Do you happen to have specs...
-
 dimitre replied to the thread Teensy 3.2 SPI speed decreasing over time.Thanks. I've updated the code with Paul suggestions, and converted my RGB phasing to radians, so now code is working great I've used std::modf instead of modff, to use radians directly #include <Arduino.h> #include <SPI.h> float twopi = PI *...
dimitre replied to the thread Teensy 3.2 SPI speed decreasing over time.Thanks. I've updated the code with Paul suggestions, and converted my RGB phasing to radians, so now code is working great I've used std::modf instead of modff, to use radians directly #include <Arduino.h> #include <SPI.h> float twopi = PI *... -
uint16_t r = (sin(t + 60.0 * 0.0) * max + max); uint16_t g = (sin(t + 60.0 * 1.0) * max + max); uint16_t b = (sin(t + 60.0 * 2.0) * max + max); Suggests an assumption that sin takes degrees rather than radians, so there are...
-
SShadycrisp replied to the thread Servos Misbehaving.The current is not coming from the teensy. Do you mean for the signal pin? If you mean current from the battery I believe it is sufficient if not in excess.
-
PaulS replied to the thread Servos Misbehaving.Now I'm not familiar with the Tower Pro MG90s, but when you power them with 6Vdc, is the 3V3 output of the Teensy sufficient amplitude to reliably drive the PWM control signal? Paul
-
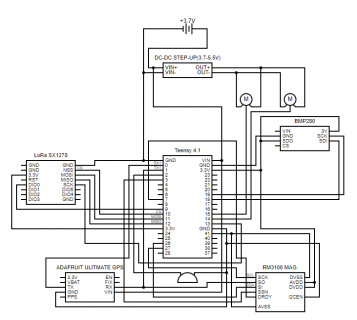
SShadycrisp replied to the thread Servos Misbehaving.Operating current is 120-250mA, The part number from the vendor I got it from is WHS15024. The circuit is part of a larger project. The Motors represent the servos. It's voltage rating s 4.8-6V.
-
-
MMarkT replied to the thread Servos Misbehaving.please describe in more detail how you are powering them than Part number, current rating, that sort of detail is essential. A diagram is helpful so we are on the same page.
-
SShadycrisp replied to the thread Servos Misbehaving.The Servo is the Tower Pro MG90S. They are connected to a 3.7V 2000mAh LiPo battery which goes through a voltage stepup to 6V
-
MMarkT replied to the thread Teensy 3.2 SPI speed decreasing over time.uint16_t r = (sin(t + 60.0 * 0.0) * max + max); uint16_t g = (sin(t + 60.0 * 1.0) * max + max); uint16_t b = (sin(t + 60.0 * 2.0) * max + max); Suggests an assumption that sin takes degrees rather than radians, so there are...
-
MMarkT replied to the thread Servos Misbehaving.Servos take a lot of current, please describe in more detail how you are powering them, the current ratings of the parts etc. Also which servos are you using?
-
SHi! I am currently using a teensy 4.1 and I am trying to control two servos. Since the voltage requirement for the servos(Tower Pro GM90S) are 4-6v, I am using a voltage step up to power them. This of course increases the current as well. I am...
-
Sshawn replied to the thread GCC won't shut up about irrelevant ABI changes (needs "-Wno-psabi" ?).Some relevant links: * https://www.downtowndougbrown.com/2023/09/how-am-i-supposed-to-safely-disable-this-warning-on-arm-gcc/ * https://stackoverflow.com/questions/72052105/how-can-i-suppress-certain-abi-change-notes-embedded-c
-
STrue to the title of the thread, I was wiring up the two new eyes I bought (see the previous post, #151). Now of course these new eyes have a different wiring layout than the previous eyes. So to test them out, I added jumper wires to the...
-
SNah, with all the talk of version 2, very easy to do.
-
Jjoepasquariello replied to the thread Teensy 3.2 SPI speed decreasing over time.Nice catch, Paul. I looked at the question and never thought of that issue with sin(). Since he only needs the fractional part, I think the code can be simplified by using fmodf() rather than modff(). float angle = t + 60.0 * 2.0; //...
-
Mmatthunter1448 replied to the thread 3.2 to 4.0 teensy nextion display code.i think this works it now loads for the upload i will check it soon thanks
-
 wwatson replied to the thread Call to arms | Teensy + SDRAM = true.16 bits... lcdRegWrite(RA8876_CCR);//01h #if defined(USE_8080_IF) if(BUS_WIDTH == 16) { lcdDataWrite(RA8876_PLL_ENABLE<<7|RA8876_WAIT_NO_MASK<<6|RA8876_KEY_SCAN_DISABLE<<5|RA8876_TFT_OUTPUT24<<3...
wwatson replied to the thread Call to arms | Teensy + SDRAM = true.16 bits... lcdRegWrite(RA8876_CCR);//01h #if defined(USE_8080_IF) if(BUS_WIDTH == 16) { lcdDataWrite(RA8876_PLL_ENABLE<<7|RA8876_WAIT_NO_MASK<<6|RA8876_KEY_SCAN_DISABLE<<5|RA8876_TFT_OUTPUT24<<3... -
Mmatthunter1448 replied to the thread 3.2 to 4.0 teensy nextion display code.yes i am aware of this Thank you
-
DDogbone06 replied to the thread Call to arms | Teensy + SDRAM = true.@Rezo maybe you know more? You ran RGB at 24 bits.
-
Jjoepasquariello replied to the thread teensy4.0 pcb design file.According to this fairly recent (Jan 2023) thread, there are no actual schematic or PCB files. https://forum.pjrc.com/index.php?threads/release-of-teensy-4-1-schematic-and-pcb-files.71735/
-
wwatson replied to the thread Call to arms | Teensy + SDRAM = true.Not having good results with the SDRAM board and RA8876 in 16-bit 8080 mode. It's very unstable results:( Been playing with delays with no predictable results even at 2MHz. If I switch to 8-bit mode all of the examples in the Ra8876LiteTeensy...
-
 Nah, with all the talk of version 2, very easy to do.
Nah, with all the talk of version 2, very easy to do. -
 BriComp replied to the thread Teensyduino 1.59 Released.Nah, with all the talk of version 2, very easy to do.
BriComp replied to the thread Teensyduino 1.59 Released.Nah, with all the talk of version 2, very easy to do. -
JHi folks, It's been awhile since I've had time to do much development and I could use a sanity check on some choices I'm making. I'm working on a project where I need to read in 3 channels of PWM, do some processing, then output 3 channels of...
-
LNo matter how hard I search, I can't find teensy4.0's pcb design file. Do you know where I can download the file? Or can I get the file if you have it?
-
 stvdvs replied to the thread New Teensy 4.1 DIY Synthesizer.If you're still looking, there's a hex file in the Firmware directory in their Github repo: rolfdegen/Jeannie-Open-source-Synthesizer
stvdvs replied to the thread New Teensy 4.1 DIY Synthesizer.If you're still looking, there's a hex file in the Firmware directory in their Github repo: rolfdegen/Jeannie-Open-source-Synthesizer -
 MichaelMeissner replied to the thread 3.2 to 4.0 teensy nextion display code.Do note that the pins used for the serial ports are different between the Teensy 3.2 and Teensy 4.x. On the Teensy 3.2, Serial2 was on pins 9 (RX2) and 10 (TX2). On the Teensy 4.x, Serial2 is on pins 7 (RX2) and 8 (TX2). On both Teensies, only...
MichaelMeissner replied to the thread 3.2 to 4.0 teensy nextion display code.Do note that the pins used for the serial ports are different between the Teensy 3.2 and Teensy 4.x. On the Teensy 3.2, Serial2 was on pins 9 (RX2) and 10 (TX2). On the Teensy 4.x, Serial2 is on pins 7 (RX2) and 8 (TX2). On both Teensies, only... -
Jjsnow replied to the thread usbMIDI does not send polyphonic aftertouch message when I call sendAfterTouch(note, pressure, channel);.Right, that's the problem -- calling sendAfterTouch with 3 arguments does completely different things depending on if you're using usb or serial MIDI. If you're already aware of that, it's possible to work around, but it's a very easy mistake to...
-
CCollinK replied to the thread GCC won't shut up about irrelevant ABI changes (needs "-Wno-psabi" ?).Yes, please. It's entirely obnoxious and I hate it. GCC should learn to shut up. I don't care that something or other changed in GCC 7.1 when we are *SEVERAL* versions ahead of that. Don't care at all. I really do wish the Teensy default compile...
-
Jjdozeran replied to the thread Two Teensy 4.0 boards.I realize this is an old thread, but I just dug out some Teensies that were sitting idle. Most of them tested fine, but 2 Teensy 4.0 did not. They are not detected when trying to flash via Teensyduino. I'm now using Windows 11, Arduino 2.3.2...
-
dimitre replied to the thread Teensy 3.2 SPI speed decreasing over time.Excellent, thank you Paul
-
Kkd5rxt-mark replied to the thread 3.2 to 4.0 teensy nextion display code.I have no way to test these suggestions, but at least the suggested changes below allows compilation without error . . . maybe this will help you to get started: Change the following in your sketch above: #include <FlexCAN.h> #include...
-
Mhello I used code just like this in the past on the 3.2 now moving to a 4.0 and changing some things for new screen but wont upload and gives me errors, could anyone help fix this? I'm not much a coding person. i think it has something to do...
-
PaulStoffregen replied to the thread Teensy 3.2 SPI speed decreasing over time.My guess is the sin() function. Its input is in radian units, so ideally you should be giving it numbers between 0 to 6.28 (or whatever Pi * 2 is). But after your program has run for only 4 seconds, even for the first LED (i == 0) the numbers...
-
NNarrowboater replied to the thread Teensyduino 1.59 Released.I was right - I was being thoroughly dense. Thank you for your patience!
-
BriComp replied to the thread Teensyduino 1.59 Released.Just scroll down to Arduino 1.8.x Software Development on this page, then select your operating system. The Teensyduino for .Arduino 1.8.x will download. Once you have installed your Arduino 1.8.x (and I find that you have to execute it just...
-
NNarrowboater replied to the thread Teensyduino 1.59 Released.The .html file takes me to an IDE 2.0 scenario. The .json file is not it, is it? I'm still puzzled.
-
KDiecast boxes are pretty much standard for the stompbox builds. AK4552 vs AK4452 - of course that was typo, i mean the 32bit 4452. The volume pot will fit, tested many times in practice, the 3d model is not the type i'm going to use, i've just...
-
AAustinECEStudent replied to the thread Teensy 4.1 and CanBus.Hi, I am a new student trying to figure out how to make a code that sends out simple can fd messages to a single teensy 4.1 microcontroller. I need help with a sample code that can do this as the example codes I run. come back with many...
-
Jjoepasquariello replied to the thread Teensyduino 1.59 Released.In post #1 of this thread you will find download links for TeensyDuino installers. You just run the installer and follow the prompts.
-
NNantonos replied to the thread usbMIDI does not send polyphonic aftertouch message when I call sendAfterTouch(note, pressure, channel);.This differs from the Arduino MIDI library, which overloads the function name (and thus, can't be extended to allow an optional cable number) https://fortyseveneffects.github.io/arduino_midi_library/a00032.html#ga8f9445f1808b7aa80535aec7d38de6bb...
-
NNantonos replied to the thread usbMIDI does not send polyphonic aftertouch message when I call sendAfterTouch(note, pressure, channel);.From the Teensy usb MIDI documentation https://github.com/PaulStoffregen/cores/blob/master/usb_midi/usb_api.h void sendAfterTouch(uint8_t pressure, uint8_t channel, uint8_t cable=0) { send(0xD0, pressure, 0, channel, cable); and void...
-
dimitre posted the thread Teensy 3.2 SPI speed decreasing over time in Technical Support & Questions.I'm testing some new LED strips (HD108) with Teensy 3.2 and I'm noticing some unusual Animations begin very smooth and beautiful, over time (after one minute) we can notice looking at the LEDs it gradually starts decreasing frame rate. Resetting...
-
Jjoepasquariello replied to the thread Queuing or communication between thread.Instead of TeensyThreads or FreeRTOS, I use a simple cooperative "OS" that I built myself, with mailboxes and queues for inter-task and ISR-to-task communication and this works very well for me. The underlying C queue is shown below, with each...
-
NNarrowboater replied to the thread Teensyduino 1.59 Released.Apologies if I'm being a bit dense but I don't see how to install 1.59 for IDE 1.8.19. The instrs on the pjrc website seem to assume IDE 2.x on. Can anybody point me in the right direction?
-
AAngelo replied to the thread Queuing or communication between thread.Hi, Try https://github.com/tsandmann/freertos-teensy Follow installation instructions, and examples would work easily. Then make your own project. Another very good example is https://github.com/tjaekel/Teesny_4_1 You can find some post here...