-
-
 luni replied to the thread EncoderTool wrong value on first anti-clockwise adjustment after power up.The datasheet is a bit unclear, can it be that this encoder has only half a quadrature period per detent? You can try by setting it to CountMode::full and see how much the count value increases if you rotate the encoder by one detent. I tested...
luni replied to the thread EncoderTool wrong value on first anti-clockwise adjustment after power up.The datasheet is a bit unclear, can it be that this encoder has only half a quadrature period per detent? You can try by setting it to CountMode::full and see how much the count value increases if you rotate the encoder by one detent. I tested... -
luni replied to the thread EncoderTool wrong value on first anti-clockwise adjustment after power up.I tested your code with a directly connected encoder (common GND) without any additional stuff. It works without issue here.
-
luni replied to the thread EncoderTool wrong value on first anti-clockwise adjustment after power up.Looks like it doesn't read the pinlevels at startup correctly. How did you connect the encoder?
-
luni replied to the thread Compile once: warning(s), Compile again: no warnings?.Thats not an error in your code but some glitch in the Arduino IDE. Seems like deleting the files in your temp folder fixes ist: https://forum.arduino.cc/t/internal-error-in-mingw32-gt-pch-use-address/1107884
-
luni replied to the thread Teensy 4.1 stack size of 13k enough?.If you switch the standard library from the default newlib to newlib-nano your size difference shrinks down to a few 100 bytes. Here some info about the two versions of the standard library...
-
luni replied to the thread Teensy 4.1: can't get combined UDP/TCP server to work (now with example code).I recently stumbled over std::optional which comes in handy for such situations. Of course, changing an already published API is a no-go, but std::optional seems to be a nice tool for the toolbox... #include <optional> std::optional<unsigned>...
-
luni replied to the thread Very high code RAM usage.Instead of SMALLEST_CODE you could also try to add --specs=nano.specs which will switch to newlib-nano (same as SMALLEST_CODE does) but keeps the optimization level.
-
luni replied to the thread Very high code RAM usage.Looks like you don't compile for gnu++17. Make sure -std=gnu++17 is set in your build options
-
luni replied to the thread Crash when putting FlexCAN objects in RAM2.You are right of course. To be on the save side one should use DMAMEM alignas(A) uint8_t buf[sizeof (A)]; // statically allocate memory for an object of type A to allocate the buffer.
-
luni replied to the thread Crash when putting FlexCAN objects in RAM2.Here a quick test which shows that the compiler relys on initialization during startup. class A { public: int i = 42; const int c = 17; void print() { Serial.printf("i=%d &i=%p\n", i, &i); Serial.printf("c=%d...
-
luni replied to the thread Help with Teensy Loader.I have successfully worked on a proof of concept to upload ehex files with TeensySharp. However, I haven't integrated it into the library yet. Anyway, the purpose of TeensySharp is to allow users to integrate Teensy detection and firmware upload...
-
luni replied to the thread RESOLVED - T4.1 using Bounce2, boolean operators not working as expected..Actually isPressed() returns the debounced state of the button. So, replacing pressed() by isPressed() in @japreja s code should work. Here an example showing the behaviour of isPressed() #include "Bounce2.h" Button b1; void setup() {...
-
-
luni replied to the thread Lightweight C++ callbacks.Thanks, I'll fix that. However, CallbackHelper was just an experiment to understand how those things work. Please note that since the new TD1.59, the core contains teensy::Inplace_function which is a much better solution.
-
luni replied to the thread Encoder Tester.Thanks for spotting this. I'll have a look
-
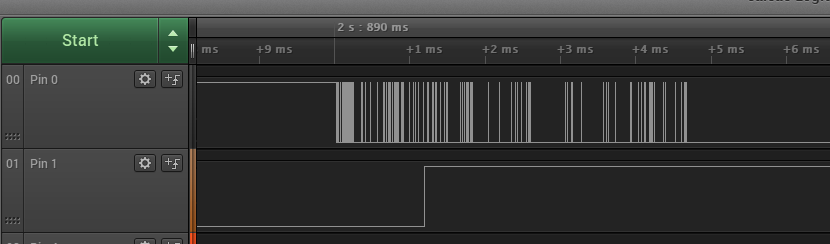
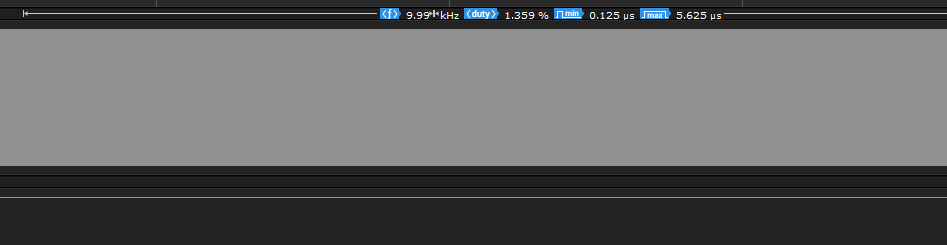
luni replied to the thread getting fatal error: teensy4/teensy.h: No such file or directory when running code below.You can't. For frequency measurements see here: https://www.pjrc.com/teensy/td_libs_FreqCount.htm For pulse height you need to use analogRead, but that will be difficult if you have short pulses For pulse width see here...
-
luni replied to the thread getting fatal error: teensy4/teensy.h: No such file or directory when running code below.Paul gave you the link to the documentation of the library in #13 above. It contains all information how to use it. However, it does not contain a "simple list of commands". I can give you examples if you tell us what you want to achieve with...
-
luni replied to the thread getting fatal error: teensy4/teensy.h: No such file or directory when running code below.No
-
luni replied to the thread getting fatal error: teensy4/teensy.h: No such file or directory when running code below.You didn't specify how precice you need that pulse. If you only need something roughly 10ns you can use the following code. It will generate a pulse of about 13ns every 50ms. IntervalTimer timer; void pulse() { digitalWriteFast(0,HIGH)...
-
luni replied to the thread using DMAMEM.Technically you'd put the objects in DMAMEM, not the class. Here an example: c1 lives in ITCM, c2 lives in DMAMEM and c3 in FLASHMEM class myClass { public: unsigned i = 42; }; myClass c1; DMAMEM myClass c2; FLASHMEM const myClass c3; void...
-
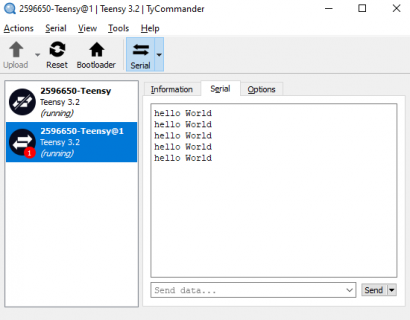
luni replied to the thread WebUSB on teensy.I just gave WebSerial a try. This is also very simple to use: Here a simple test web page: <!DOCTYPE html> <html> <head> <title>Page Title2</title> </head> <body> <h1>WebSerial Tester</h1> <button type="button"...
-
-
luni replied to the thread WebUSB on teensy.@PaulS, Maybe I didn't understand this correctly, but I always thought WebUSB is a low level API where you directly communicate to endpoints / interfaces etc. Thus, wouldn't you need a corresponding driver on the Teensy side to make this work...
-
luni replied to the thread JSON Deserialization slow'ish, blocks Stepper Motors.Actully accelstepper::run() is not very expensive and the T4.1 processor is quite fast. Here a simple test which moves 4 steppers with random parameters. tick() calls the run() functions of the steppers in a timer interrupt every 100µs. During...
-
-
luni replied to the thread JSON Deserialization slow'ish, blocks Stepper Motors.Did you try to simply call the accelstepper::run() functions from a timer interrupt?
-
luni replied to the thread WebUSB on teensy.In case WebHID is sufficient: I did try it some time ago, it worked nicely with minimal code: https://forum.pjrc.com/index.php?threads/making-webusb-work-with-the-teensy-what-is-pluggableusb.60782/post-247184. I just tried it, it still compiles...
-
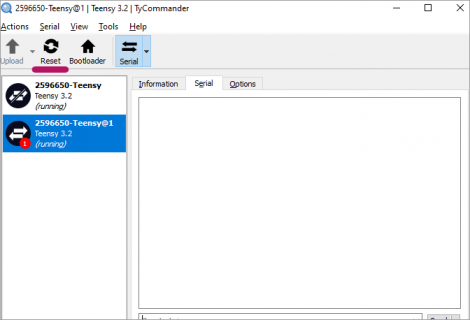
luni replied to the thread Force windows to re-enumerate teensy USB device.If resetting the device would do what you need, you could use tyCommander:
-
-
luni replied to the thread Teensyduino 1.59 Beta #5.Yes, I'll never understand why the Arduino IDE doesn't have a simple "clean all". Anyway, the note is issued during compiling, not linking. So, in this case forcing a rebuild doesn't help.
-
luni replied to the thread Teensyduino 1.59 Beta #5.I can reproduce that with @PaulStoffregen s code. I also saw that the warning/note is generated by the compiler, not the linker. So, opposed to what was written in the StackOverflow link it doesn't help doing a clean recompile. Anyway, you can...
-
luni replied to the thread Teensy 4.1 program compiles fine, but upload attempts fail.If you post the hex file I can try to reproduce the issue.
-
luni replied to the thread Teensyduino 1.59 Beta #5.The warning seems to be about linking code compiled with an older compiler to code compiled with a newer compiler. See here for details: https://stackoverflow.com/a/48149400/1842762. Are you sure that you are doing a clean rebuild? Are you...
-
luni replied to the thread Teensyduino 1.59 Beta #5.There still is a leftover from the old code in intervaltimer.h: https://github.com/PaulStoffregen/cores/blob/c5e716375532ae0d8b912d7034707c0859b68801/teensy4/IntervalTimer.h#L73C2-L78C3 here the corresponding PR...
-
luni replied to the thread IntervalTimer calling function with parameters.Registering an interrupt service routine (ISR) is usually done by storing its address in a table (often called the "vector table"). The IntervalTimer.begin() function does this for you. If an interrupt wtih number n occurs, the processor...
-
luni replied to the thread Does x/2 compile to arithmetic right shift?.@cmarcus: Here you can experiment: https://godbolt.org/z/djMe46bj1 As mentioned above, signed integers generate much more code than an unsigned version
-
luni replied to the thread High bandwidth comm between Teensy4.1 and PC.Couple of years ago I did a lot of experiments with high speed data transfer over usb serial. It turned out that on Win10 you can stably transfer some 10MByte/sec from a Teensy to a dotNet (C#) application. However, there is a known bug in the...
-
-
Loading…
-
Loading…