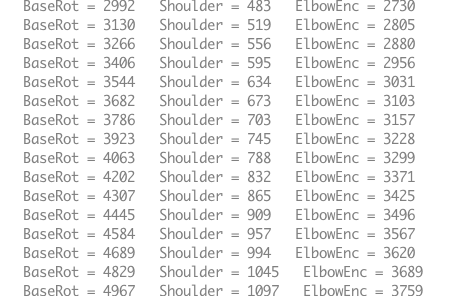
The Zero procedure worked, but I still have bad readings when 4 PIDs are working
Here is a sample, see how the numbers skip?
This does not happen if I just run your reading sketch and I just move the arm by hand...
You can see the PIDs in the original sketch, they dont allow uploading the sketch again...
Here is a video of the arm
https://youtu.be/yQxl888nHJQ
I am on teensy 3.5, I wonder if 3.6 will be better?
Thanks
TestKnobVal= 10 BaseRot = 2728 Shoulder = 1722 ElbowEnc = 4017 Wrist_R = 325 Wrist_L = -1
TestKnobVal= 10 BaseRot = 2746 Shoulder = 1757 ElbowEnc = 4017 Wrist_R = 326 Wrist_L = -1
TestKnobVal= 10 BaseRot = 2789 Shoulder = 1804 ElbowEnc = 4017 Wrist_R = 327 Wrist_L = -1
TestKnobVal= 10 BaseRot = 2827 Shoulder = 1838 ElbowEnc = 4017 Wrist_R = 328 Wrist_L = -1
TestKnobVal= 10 BaseRot = 2880 Shoulder = 1883 ElbowEnc = 4017 Wrist_R = 329 Wrist_L = -1
TestKnobVal= 10 BaseRot = 2916 Shoulder = 1917 ElbowEnc = 4017 Wrist_R = 330 Wrist_L = -1
TestKnobVal= 10 BaseRot = 2958 Shoulder = 1963 ElbowEnc = 4016 Wrist_R = 331 Wrist_L = -1
TestKnobVal= 10 BaseRot = 2982 Shoulder = 1999 ElbowEnc = 4016 Wrist_R = 331 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3011 Shoulder = 2047 ElbowEnc = 4016 Wrist_R = 332 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3033 Shoulder = 2083 ElbowEnc = 4016 Wrist_R = 333 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3064 Shoulder = 2139 ElbowEnc = 4015 Wrist_R = 334 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3089 Shoulder = 2185 ElbowEnc = 4014 Wrist_R = 334 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3115 Shoulder = 2233 ElbowEnc = 4013 Wrist_R = 336 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3150 Shoulder = 2298 ElbowEnc = 4012 Wrist_R = 338 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3175 Shoulder = 2347 ElbowEnc = 4012 Wrist_R = 339 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3201 Shoulder = 2395 ElbowEnc = 4012 Wrist_R = 340 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3236 Shoulder = 2444 ElbowEnc = 4012 Wrist_R = 343 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3265 Shoulder = 2476 ElbowEnc = 4011 Wrist_R = 345 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3294 Shoulder = 2507 ElbowEnc = 4011 Wrist_R = 346 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3333 Shoulder = 2545 ElbowEnc = 4011 Wrist_R = 347 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3359 Shoulder = 2571 ElbowEnc = 4011 Wrist_R = 348 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3384 Shoulder = 2594 ElbowEnc = 4011 Wrist_R = 350 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3412 Shoulder = 2622 ElbowEnc = 4011 Wrist_R = 355 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3433 Shoulder = 2642 ElbowEnc = 4011 Wrist_R = 357 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3452 Shoulder = 2662 ElbowEnc = 4010 Wrist_R = 359 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3479 Shoulder = 2689 ElbowEnc = 4010 Wrist_R = 362 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3501 Shoulder = 2711 ElbowEnc = 4010 Wrist_R = 366 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3526 Shoulder = 2734 ElbowEnc = 4010 Wrist_R = 369 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3560 Shoulder = 2764 ElbowEnc = 4010 Wrist_R = 370 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3586 Shoulder = 2787 ElbowEnc = 4010 Wrist_R = 372 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3611 Shoulder = 2811 ElbowEnc = 4010 Wrist_R = 374 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3640 Shoulder = 2843 ElbowEnc = 4010 Wrist_R = 378 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3660 Shoulder = 2869 ElbowEnc = 4010 Wrist_R = 382 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3680 Shoulder = 2894 ElbowEnc = 4010 Wrist_R = 386 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3706 Shoulder = 2928 ElbowEnc = 4010 Wrist_R = 394 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3727 Shoulder = 2952 ElbowEnc = 4010 Wrist_R = 401 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3748 Shoulder = 2975 ElbowEnc = 4010 Wrist_R = 413 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3777 Shoulder = 3004 ElbowEnc = 4010 Wrist_R = 435 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3800 Shoulder = 3024 ElbowEnc = 4010 Wrist_R = 456 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3823 Shoulder = 3045 ElbowEnc = 4010 Wrist_R = 480 Wrist_L = -1
TestKnobVal= 10 BaseRot = 3846 Shoulder = 3065 ElbowEnc = 4010 Wrist_R = 506 Wrist_L = -1

")