mjs513
Senior Member+
Tim
Nope readSensorCounts I added because I have an alternate method for calibrating that I am testing. ") It just returns the raw data from the sensor in counts.
It just returns the raw data from the sensor in counts.
Thanks for temp.
I agree but haven't really been monitoring at this point - worked on getting baro installed and alternate messages working. Which they are now When a version 7 gets posted with the new dt? I will incorporate my changes as well. Oh - I made the baro optional using a define, will be easy enough to add a different baro - like the MS5611 if Don wants to use it - have a library for that as well
Don
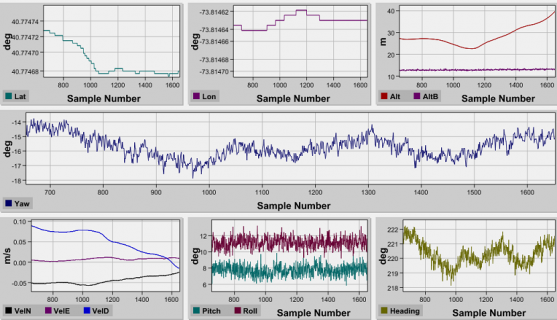
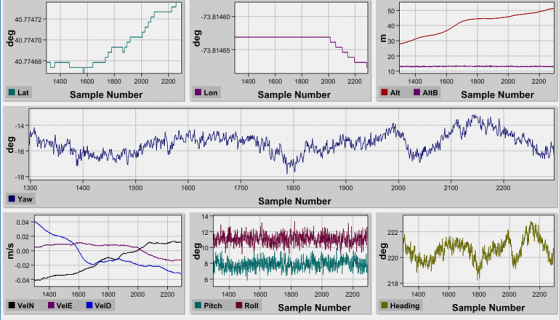
Here are those screenshots you asked for:
Mike
Code:
'readSensorCountsThanks for temp.
I agree but haven't really been monitoring at this point - worked on getting baro installed and alternate messages working. Which they are now
When a version 7 gets posted with the new dt? I will incorporate my changes as well. Oh - I made the baro optional using a define, will be easy enough to add a different baro - like the MS5611 if Don wants to use it - have a library for that as well Don
Here are those screenshots you asked for:
Mike