
Hello,
recently we have developed a circuit board that requires 2 ADS1259 for reading sensors from 0....5V over SPI with a maximum frequency of 8MHz, and I am wondering if it is fast enough.
Teensy3.2 is used. the Information from both ADS1259 is compared(substracted) and put into a PID to drive a bipolar current source for a TEC. so far so good, but I assume that it is too slow based for our TEC.
so let me explain and hope that you can help me solve or guide me in solving the following questions:
what I understand is, (somehow)
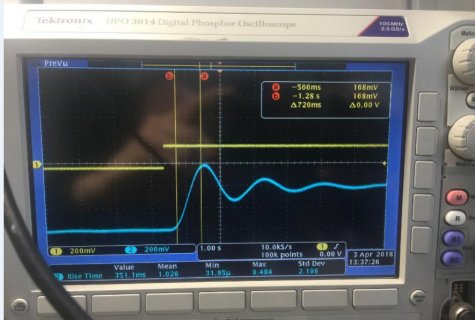
handling the process of data: The first ADS1259 starts in continious mode, record the 24 bit data and is then written to a buffer on the microprocessor. If this is complete a flag is set and the the other ads1259 takes over, with the same configuration. The values are compared in the PID which drives another SPI MAX5144. the information from both the sensors and max5144 are then read, processed and displayed on a small oled screen 10x a second or 100x a second. works like a charm but the speed of the PID is not fast enough. (PID is from Brett Beaugard). the signal input is a squarewave, and the output is the signal that follows slowly.
what I dont understand is:
1how can I calculate the processing speed of one ADS1259, processing 24 bit as fast as possible. (starttime, collect data, stoptime, senddata to the microprocessor.
is there a PDF or a book, or a Online Seminar that explains this quite well?
I would like to know how to select the right ADC converter for the right application
how do I know that it is fast enough, did I select the right Microprocessor?)
( I really like to understand the magic behind this, so that I can adapt it for other projects)
2 how does the FIFO mode between both ads1259 and the MAX5144(SPI to analog output(0...5V, no further communciation just output) affect the processing speed of the PID control loop (PID_library Arduino from Brett Beauguard)
3 Is there a better PID algorithmn on the market that reacts faster based upon the input signals from the both ads1259?,is there a pdf for this?
4 I would like to know how I can calculate the time one ads1259 needs to process continious 24 bit data start in contnious mode and send data buffer and then stop. how can I adapt this method for other ADCS ?
5 how does this account for two ads1259 doing continious mode in FIFO? if the processing of data is done in the following order= 1,2,3 whereby ads1259=1, ads1259=2,MAX5144=3 and for;;? is this the best method that exists?
6 is the teensy3.2 microprocessor the right one with one SPI Bus?
many thanks, for taking your time to read all this, and I hope I did make some sense..
and have a nice weekend.
recently we have developed a circuit board that requires 2 ADS1259 for reading sensors from 0....5V over SPI with a maximum frequency of 8MHz, and I am wondering if it is fast enough.
Teensy3.2 is used. the Information from both ADS1259 is compared(substracted) and put into a PID to drive a bipolar current source for a TEC. so far so good, but I assume that it is too slow based for our TEC.
so let me explain and hope that you can help me solve or guide me in solving the following questions:
what I understand is, (somehow)
handling the process of data: The first ADS1259 starts in continious mode, record the 24 bit data and is then written to a buffer on the microprocessor. If this is complete a flag is set and the the other ads1259 takes over, with the same configuration. The values are compared in the PID which drives another SPI MAX5144. the information from both the sensors and max5144 are then read, processed and displayed on a small oled screen 10x a second or 100x a second. works like a charm but the speed of the PID is not fast enough. (PID is from Brett Beaugard). the signal input is a squarewave, and the output is the signal that follows slowly.
what I dont understand is:
1how can I calculate the processing speed of one ADS1259, processing 24 bit as fast as possible. (starttime, collect data, stoptime, senddata to the microprocessor.
is there a PDF or a book, or a Online Seminar that explains this quite well?
I would like to know how to select the right ADC converter for the right application
how do I know that it is fast enough, did I select the right Microprocessor?)
( I really like to understand the magic behind this, so that I can adapt it for other projects)
2 how does the FIFO mode between both ads1259 and the MAX5144(SPI to analog output(0...5V, no further communciation just output) affect the processing speed of the PID control loop (PID_library Arduino from Brett Beauguard)
3 Is there a better PID algorithmn on the market that reacts faster based upon the input signals from the both ads1259?,is there a pdf for this?
4 I would like to know how I can calculate the time one ads1259 needs to process continious 24 bit data start in contnious mode and send data buffer and then stop. how can I adapt this method for other ADCS ?
5 how does this account for two ads1259 doing continious mode in FIFO? if the processing of data is done in the following order= 1,2,3 whereby ads1259=1, ads1259=2,MAX5144=3 and for;;? is this the best method that exists?
6 is the teensy3.2 microprocessor the right one with one SPI Bus?
many thanks, for taking your time to read all this, and I hope I did make some sense..
and have a nice weekend.
")