Hello all,
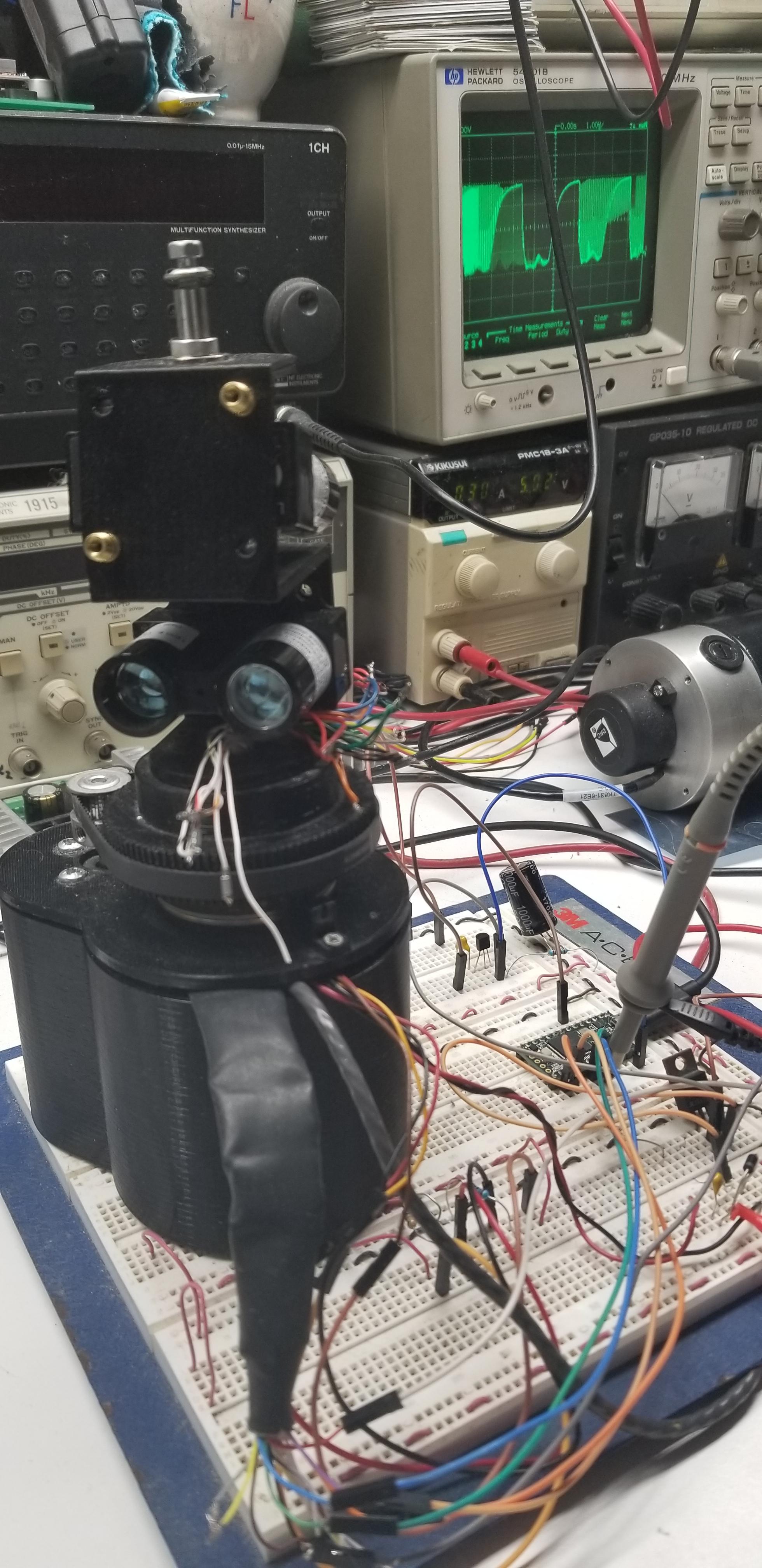
I have 2 Lidar Lite v3's connected together in an attempt to make a spinning lidar using a teensy 3.2. I had originally tried this on an Arduino Nano, but it seemed to need a little more horsepower.
I can get the units to communicate, can readdress them and get telemetry via I2C, but I have 2 issues:
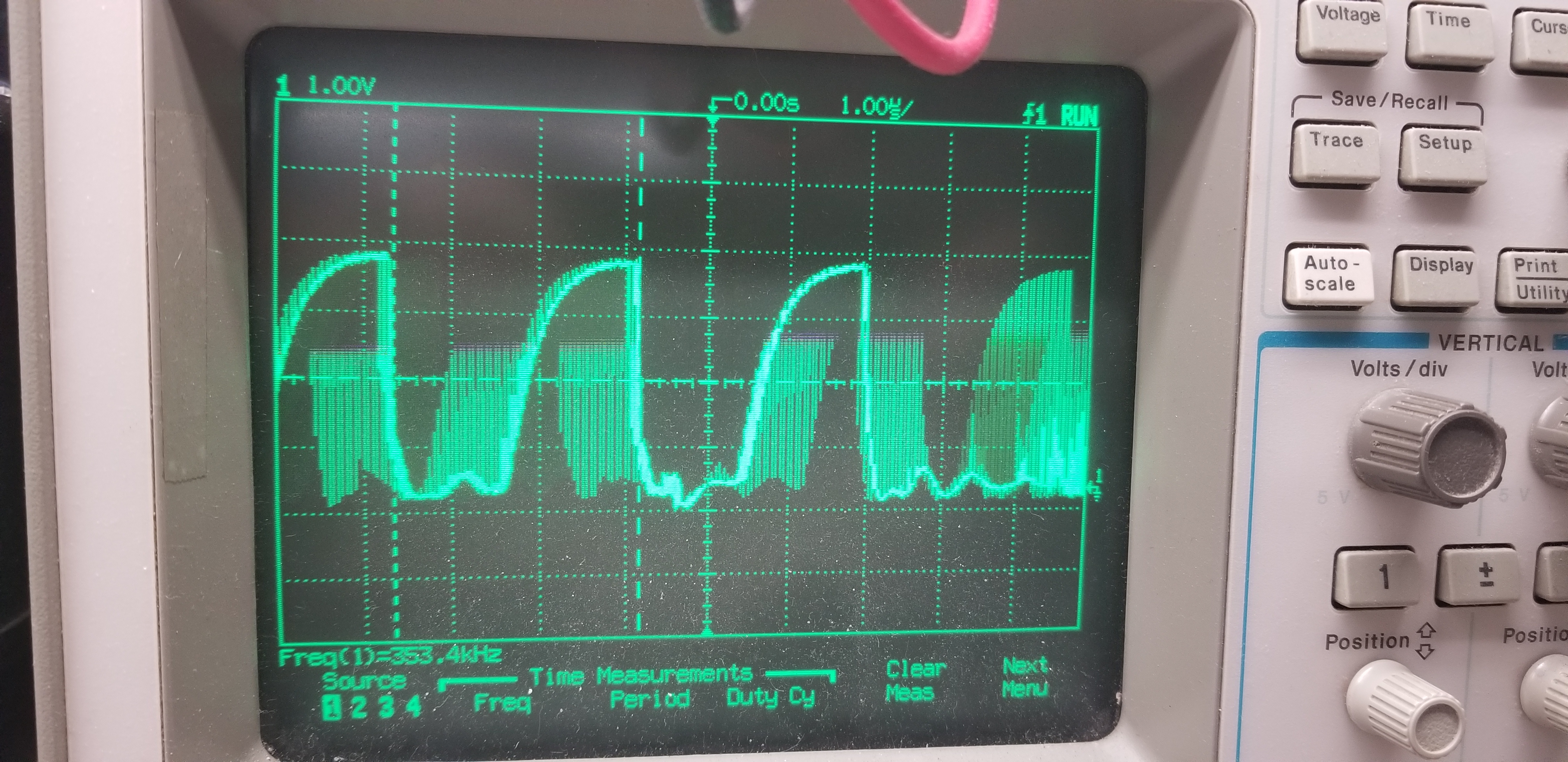
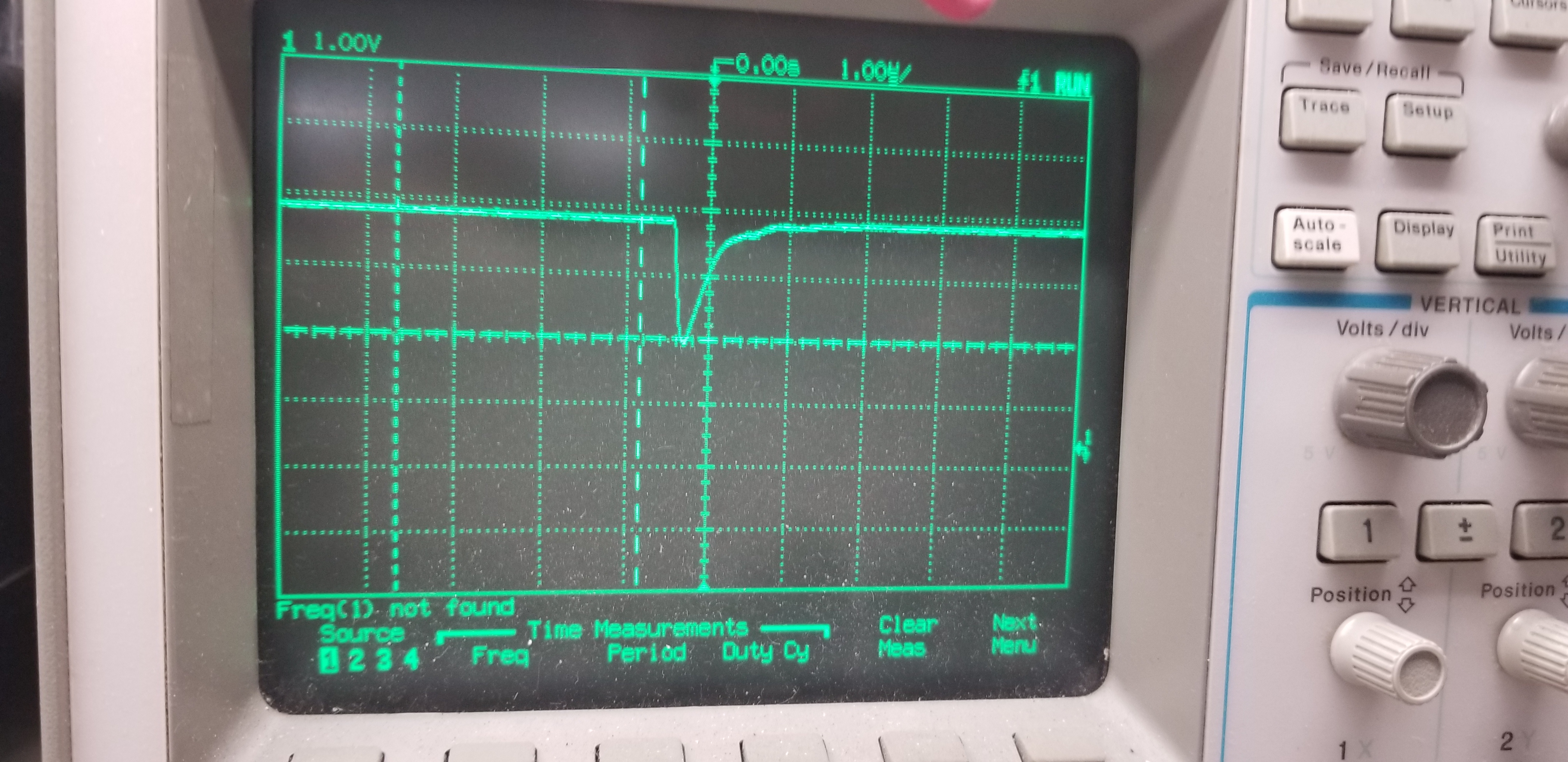
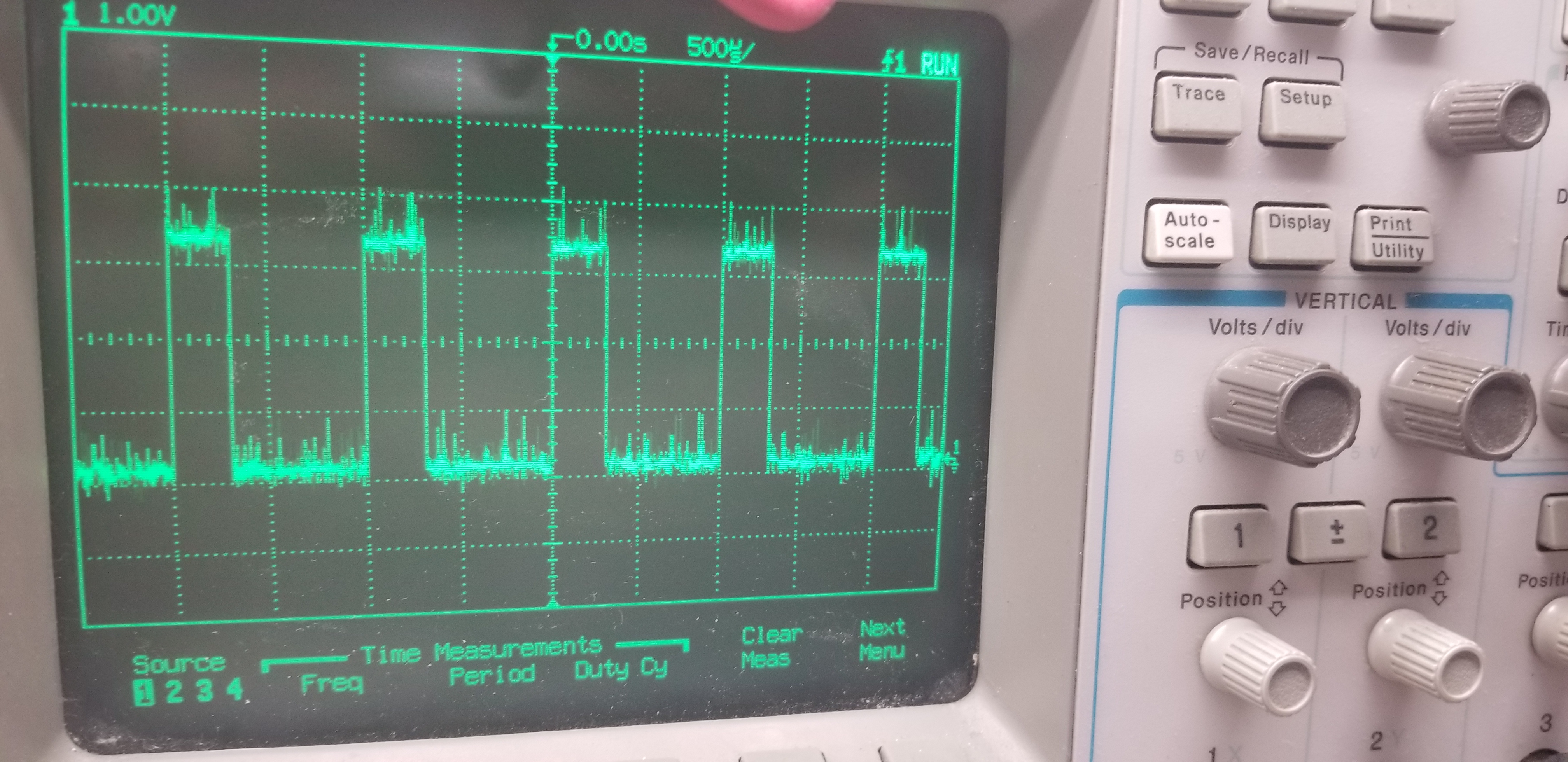
1st: I am using PWM to drive a MOSFET for the motor that spins the lidar. As soon as I activate PWM output on any pin (I say any but I tested 3) my I2C immediately goes all nacks. Pretty solid until I activate the PWM output, though it does eventually fail at some point much later.
2nd: I am getting rather slow results from the units, at around 100 reads\s from both units combined. Garmin says typical should be over 250/s (600/s with high speed) and I'd assume since I have 2 I'd get close to twice that. Is there some trick to getting these to update faster? I have tried standard mode and higher speed standard mode, but not full High speed as I need better longer range performance. I am using 400k I2C.
Code is below: (note: I have modified the lidar lite library to work with the i2c_t3 libraries.) This is just a basic sketch that addresses the two units and begins getting readings. I'ts nearly a copy of the default lidarLite sketch tests.
I'm hoping there are people here who have experience with both the lidar lites and teensy's. Any advice or help would be greatly appreciated. Thanks!
/*
Initial setup and port of testing routines to teensy 3.2
*/
#include <Arduino.h>
#include <i2c_t3.h>
#include <LIDARLite.h>
LIDARLite myLidarLite;
byte add1[1];
byte add2[1];
byte arr[1];
void setup() {
Serial.begin(115200); // Initialize serial connection to display distance readings
/*
begin(int configuration, bool fasti2c, char lidarliteAddress)
Starts the sensor and I2C.
Parameters
----------------------------------------------------------------------------
configuration: Default 0. Selects one of several preset configurations.
fasti2c: Default 100 kHz. I2C base frequency.
If true I2C frequency is set to 400kHz.
lidarliteAddress: Default 0x62. Fill in new address here if changed. See
operating manual for instructions.
*/
Wire.setDefaultTimeout(200);
myLidarLite.begin(2, true); // Set configuration to higher speed normal and I2C to 400 kHz
SetAddresses();
delay(2000);
runScan();
//delay(2000);
/*
configure(int configuration, char lidarliteAddress)
Selects one of several preset configurations.
Parameters
----------------------------------------------------------------------------
configuration: Default 0.
0: Default mode, balanced performance.
1: Short range, high speed. Uses 0x1d maximum acquisition count.
2: Default range, higher speed short range. Turns on quick termination
detection for faster measurements at short range (with decreased
accuracy)
3: Maximum range. Uses 0xff maximum acquisition count.
4: High sensitivity detection. Overrides default valid measurement detection
algorithm, and uses a threshold value for high sensitivity and noise.
5: Low sensitivity detection. Overrides default valid measurement detection
algorithm, and uses a threshold value for low sensitivity and noise.
lidarliteAddress: Default 0x62. Fill in new address here if changed. See
operating manual for instructions.
*/
//myLidarLite.configure(2); // Change this number to try out alternate configurations if not set at begin
// Motor speed control
// analogWrite(3, 80); / This command kills the I2C on pins 3, 22, and 23
}
void SetAddresses()
{
pinMode(14, OUTPUT); pinMode(15, OUTPUT);
LIDARLite myLidarLite;
delay(40);
digitalWrite(14, LOW); //Reset PW_En Pin top LL
Serial.println("top low");
delay(40);
digitalWrite(15, LOW); //Reset PW_EN Pin Bottom LL
Serial.println("bottom low");
delay(40);
digitalWrite(14, HIGH); //En top LL
delay(40);
myLidarLite.setI2Caddr(0x66, true, 0x62);Serial.println("address changed 66"); //Set Top LL Add to 0x66
delay(20);
digitalWrite(15, HIGH); //En bottom LL
delay(40);
myLidarLite.setI2Caddr(0x64, true, 0x62);Serial.println("address changed 64"); //Set Bottom LL Add to 0x64
}
void runScan()
{
byte error, address;
int nDevices;
Serial.println("Scanning...");
nDevices = 0;
for(address = 1; address < 127; address++ )
{
//Serial.print(address);
// The i2c_scanner uses the return value of
// the Write.endTransmisstion to see if
// a device did acknowledge to the address.
Wire.beginTransmission(address);
error = Wire.endTransmission();
if (error == 0)
{
Serial.print("I2C device found at address 0x");
if (address<16)
Serial.print("0");
Serial.print(address,HEX);
Serial.println(" !");
nDevices++;
}
else if (error==4)
{
Serial.print("Unknown error at address 0x");
if (address<16)
Serial.print("0");
Serial.println(address,HEX);
}
}
if (nDevices == 0)
Serial.println("No I2C devices found\n");
else
Serial.println("done\n");
delay(5000); // wait 5 seconds for next scan
}
void loop() {
// put your main code here, to run repeatedly:
Serial.print(myLidarLite.distance(true,0x64));Serial.println(" bottom");
//delay(1);
Serial.print(myLidarLite.distance(true,0x66));Serial.println(" top");
//delay(1);
//Take 99 measurements without receiver bias correction and print to serial terminal
for(int i = 0; i < 99; i++)
{
Serial.println(myLidarLite.distance(false,0x64));
//delay(1);
Serial.println(myLidarLite.distance(false,0x66));
//delay(1);
}
//*/
}
I have 2 Lidar Lite v3's connected together in an attempt to make a spinning lidar using a teensy 3.2. I had originally tried this on an Arduino Nano, but it seemed to need a little more horsepower.
I can get the units to communicate, can readdress them and get telemetry via I2C, but I have 2 issues:
1st: I am using PWM to drive a MOSFET for the motor that spins the lidar. As soon as I activate PWM output on any pin (I say any but I tested 3) my I2C immediately goes all nacks. Pretty solid until I activate the PWM output, though it does eventually fail at some point much later.
2nd: I am getting rather slow results from the units, at around 100 reads\s from both units combined. Garmin says typical should be over 250/s (600/s with high speed) and I'd assume since I have 2 I'd get close to twice that. Is there some trick to getting these to update faster? I have tried standard mode and higher speed standard mode, but not full High speed as I need better longer range performance. I am using 400k I2C.
Code is below: (note: I have modified the lidar lite library to work with the i2c_t3 libraries.) This is just a basic sketch that addresses the two units and begins getting readings. I'ts nearly a copy of the default lidarLite sketch tests.
I'm hoping there are people here who have experience with both the lidar lites and teensy's. Any advice or help would be greatly appreciated. Thanks!
/*
Initial setup and port of testing routines to teensy 3.2
*/
#include <Arduino.h>
#include <i2c_t3.h>
#include <LIDARLite.h>
LIDARLite myLidarLite;
byte add1[1];
byte add2[1];
byte arr[1];
void setup() {
Serial.begin(115200); // Initialize serial connection to display distance readings
/*
begin(int configuration, bool fasti2c, char lidarliteAddress)
Starts the sensor and I2C.
Parameters
----------------------------------------------------------------------------
configuration: Default 0. Selects one of several preset configurations.
fasti2c: Default 100 kHz. I2C base frequency.
If true I2C frequency is set to 400kHz.
lidarliteAddress: Default 0x62. Fill in new address here if changed. See
operating manual for instructions.
*/
Wire.setDefaultTimeout(200);
myLidarLite.begin(2, true); // Set configuration to higher speed normal and I2C to 400 kHz
SetAddresses();
delay(2000);
runScan();
//delay(2000);
/*
configure(int configuration, char lidarliteAddress)
Selects one of several preset configurations.
Parameters
----------------------------------------------------------------------------
configuration: Default 0.
0: Default mode, balanced performance.
1: Short range, high speed. Uses 0x1d maximum acquisition count.
2: Default range, higher speed short range. Turns on quick termination
detection for faster measurements at short range (with decreased
accuracy)
3: Maximum range. Uses 0xff maximum acquisition count.
4: High sensitivity detection. Overrides default valid measurement detection
algorithm, and uses a threshold value for high sensitivity and noise.
5: Low sensitivity detection. Overrides default valid measurement detection
algorithm, and uses a threshold value for low sensitivity and noise.
lidarliteAddress: Default 0x62. Fill in new address here if changed. See
operating manual for instructions.
*/
//myLidarLite.configure(2); // Change this number to try out alternate configurations if not set at begin
// Motor speed control
// analogWrite(3, 80); / This command kills the I2C on pins 3, 22, and 23
}
void SetAddresses()
{
pinMode(14, OUTPUT); pinMode(15, OUTPUT);
LIDARLite myLidarLite;
delay(40);
digitalWrite(14, LOW); //Reset PW_En Pin top LL
Serial.println("top low");
delay(40);
digitalWrite(15, LOW); //Reset PW_EN Pin Bottom LL
Serial.println("bottom low");
delay(40);
digitalWrite(14, HIGH); //En top LL
delay(40);
myLidarLite.setI2Caddr(0x66, true, 0x62);Serial.println("address changed 66"); //Set Top LL Add to 0x66
delay(20);
digitalWrite(15, HIGH); //En bottom LL
delay(40);
myLidarLite.setI2Caddr(0x64, true, 0x62);Serial.println("address changed 64"); //Set Bottom LL Add to 0x64
}
void runScan()
{
byte error, address;
int nDevices;
Serial.println("Scanning...");
nDevices = 0;
for(address = 1; address < 127; address++ )
{
//Serial.print(address);
// The i2c_scanner uses the return value of
// the Write.endTransmisstion to see if
// a device did acknowledge to the address.
Wire.beginTransmission(address);
error = Wire.endTransmission();
if (error == 0)
{
Serial.print("I2C device found at address 0x");
if (address<16)
Serial.print("0");
Serial.print(address,HEX);
Serial.println(" !");
nDevices++;
}
else if (error==4)
{
Serial.print("Unknown error at address 0x");
if (address<16)
Serial.print("0");
Serial.println(address,HEX);
}
}
if (nDevices == 0)
Serial.println("No I2C devices found\n");
else
Serial.println("done\n");
delay(5000); // wait 5 seconds for next scan
}
void loop() {
// put your main code here, to run repeatedly:
Serial.print(myLidarLite.distance(true,0x64));Serial.println(" bottom");
//delay(1);
Serial.print(myLidarLite.distance(true,0x66));Serial.println(" top");
//delay(1);
//Take 99 measurements without receiver bias correction and print to serial terminal
for(int i = 0; i < 99; i++)
{
Serial.println(myLidarLite.distance(false,0x64));
//delay(1);
Serial.println(myLidarLite.distance(false,0x66));
//delay(1);
}
//*/
}