@mjs513 - Sort of the same was as T4.x... Hold the program button for about 15 seconds, But there is a timeout after N more seconds... So it usually takes me a couple of attempts to get it to work... (Or use hammer
")
and use a different one
)
For the heck of it I thought I would try the RF24 library as Sparkfun suggests using it.
I loaded up the GettingStarted Sketch.
Started off with T3.2 and T4.1
Edited line: RF24 radio(9,10); And built on T3.2 leaving radioNumber = 0
On the T4.1 I changed the radioNumber = 1 and downloaded...
Noticed I was not seeing the messages at start so edited:
Code:
void setup() {
while(!Serial && millis() < 4000) ;
Serial.begin(115200);
Serial.println(F("RF24/examples/GettingStarted"));
Serial.println(F("*** PRESS 'T' to begin transmitting to the other node"));
Serial.flush();
radio.begin();
...
And then showed that I need to type a T So I did:
And started seeing things like in the Terminal monitor for T4.1:
Code:
Now sending
Sent 423326336, Got response 423326336, Round-trip delay 1494 microseconds
Now sending
Sent 424328145, Got response 424328145, Round-trip delay 1494 microseconds
Now sending
And in other:
Code:
Sent response 485440639
Sent response 486442448
Sent response 487444269
Sent response 488446090
...
So I replaced the T3.2 back with T4 and programmed it and it continued to work for T4 to T4.1...
Restarted both boards, did the T this time from the T4 and it worked talking to T4.1...
Build shows I am using the RF24 out of my libraries folder...
Code:
Multiple libraries were found for "RF24.h"
Used: C:\Users\kurte\Documents\Arduino\libraries\RF24
Not used: C:\Users\kurte\Documents\Arduino\libraries\arduino_367930
Using library SPI at version 1.0 in folder: C:\Users\kurte\Documents\Arduino\libraries\SPI
Using library RF24 at version 1.3.9 in folder: C:\Users\kurte\Documents\Arduino\libraries\RF24
So in this case at least the basics work.
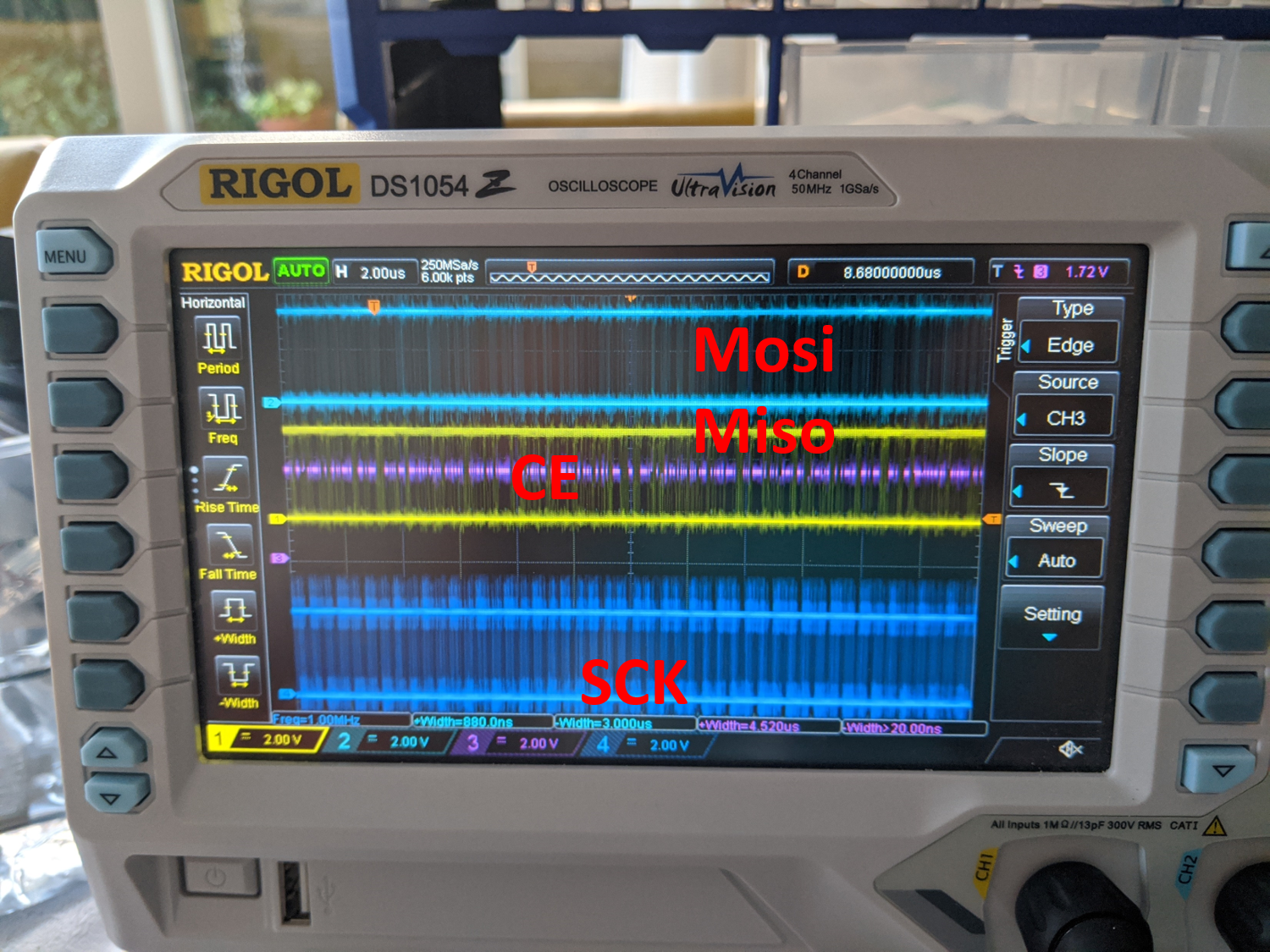
But sort of side point it the one that is waiting to receive data is totally saturating the SPI bus ... As you maybe can see in:
View attachment 21454
It cycles through a lot of asking for the current status until it shows the RX is not empty.
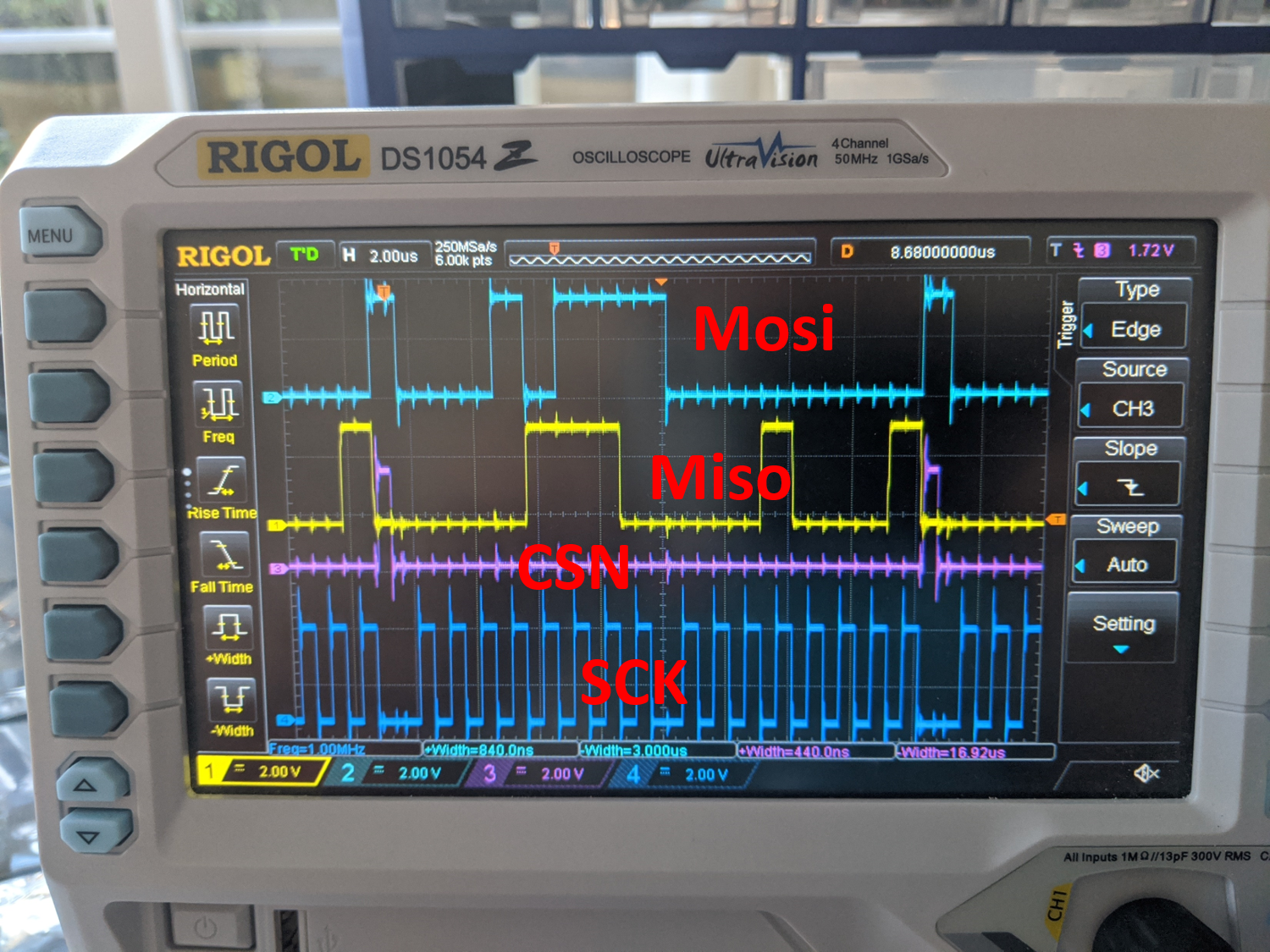
You can see some of this in this portion at the end of one of those clumps...
View attachment 21455
Note the top channel (0) which I shrunk the height of is the IRQ pin... Looks like it drops low when it receives data. Wonder if the library can be configured to look at IRQ pin...
Probably, I just have not looked yet.